
「從事自動化控制設備的廠商來問我,能不能用機器人幫農民採小黃瓜?」黃登淵發現台灣農村的人力短缺問題嚴重,於是決定以自身擅長的AI影像辨識技術為基礎展開研發。
在不久的未來,彰化芳苑鄉的農田將迎來一場技術革命,小黃瓜的採收工作將不再是年邁農夫的傳統勞動,而是由結合人工智慧、機械手臂和行動載台的AI機器人完成。這些智能機器人,憑藉著先進的AI影像辨識技術,能夠在田間移動,準確辨識成熟的小黃瓜,並用機械手臂輕巧地將其摘下,這或許將成為未來台灣農地的常見景象。

作物收穫人手不足 自動化設備廠商找上門
主導這項技術研發的,是擁有豐富人工智慧、圖形識別和影像處理經驗的大葉大學電機工程學系教授黃登淵。他表示,當技術成熟後,這種機器人不僅能夠採摘小黃瓜,也能應用在芭樂、蘋果等在樹上生長的水果。
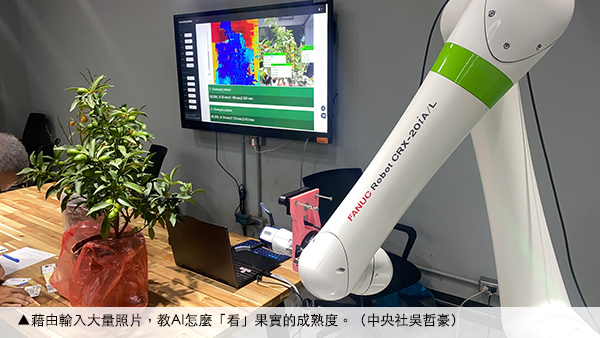
採訪當天,走進大葉大學工學院的研究室,黃登淵正與自動控制研發公司的工程師合作,指導AI機器人如何透過影像識別技術「看」金桔樹上的果實,辨別哪些可採摘,哪些需要留在樹上。
「彰化芳苑鄉有小黃瓜田,當地人力不足,從事自動化控制設備的廠商來問我,能不能用機器人幫農民採小黃瓜?」黃登淵回憶起研發可採摘水果機器人的初衷說,當地農民人手不足,有時只能採摘外觀及品質最好的小黃瓜。面對這個問題,廠商找上門來,他也發現台灣農村的人力短缺問題嚴重,於是決定與業者合作,以自身擅長的AI影像辨識技術為基礎展開研發。
影像教AI辨識熟度 旋轉摘果避免損傷
「在國外,使用AI影像辨識技術判斷水果是否成熟的程式相當昂貴。」黃登淵解釋,要使機器人學會採摘小黃瓜,首先要教它分辨出哪些小黃瓜已經成熟,哪些需要等待更長的時間,而這就依賴使用大量照片建立的AI程式和模型。
從小黃瓜的種苗階段到發芽、開花再到結果,整個過程需要約45至50天。為了讓機器人學會辨識這一過程,黃登淵和廠商的工程師團隊拍攝了大量照片,再輸入電腦讓AI檢測和識別。他解釋,由於之前沒有相似的模型可供參考,團隊一開始只能慢慢摸索改進。起初,AI機器人需要進行1,000多張照片的學習,但現在只需要100多張照片就能達到相同的效果。
至於如何讓機器人順利摘下果實,黃登淵指出,團隊研發的機器人上方的機械手臂設有鏡頭,可以計算出與果實之間的距離,機械手臂上的夾爪配備有感測器,當果實較硬時會施加較大的力量,以確保摘取過程中不會損傷果實。
「要摘取果實,有些人使用剪刀,有些人使用熱融技術,而我們當初選擇的是旋轉的方式,主要考慮到最小化對水果的損傷。」黃登淵表示。
目前,黃登淵團隊研發的機器人已經能夠採摘小黃瓜、金桔等相對較小的水果。他解釋,他們向國科會申請的研究計畫總共有三期,目前已經進入第二期。除了教導AI識別水果的照片和自動化採摘過程之外,他們還對機器人在採摘過程中傳回伺服器的數據進行分析,以確保即時排除採摘過程中可能出現的問題。預計還需要三年的時間,才能讓機器人採摘所有在樹上的水果。
黃登淵強調,只要樹上有果實,機器人都能採摘。「等到AI模型更加完善之後,我們就可以簡化機械手臂的結構,進一步提升採摘速度,增加工作效率。」
載台學習掃地機器人 5G影像可望遠端操控
下一階段的重點研發項目是負責承載機器人的載台技術。這要求載台類似於一輛自動車,必須安裝感測器、光達等感測設備,能夠自動偵測地形變化。「將它放到果園裡,它就會自動偵測地形,開始移動採摘水果」,黃登淵說,他期望未來能夠實現像掃地機器人一樣的自動化功能。
在未來,結合5G高速傳輸的技術也將成為可能,機器人採摘果實的影像資料可以傳送回控制中心進行大數據分析。這將讓機器人能夠透過遠端操控排除障礙,進一步改變農業經營模式。
面對台灣農業人力不足的問題,AI人工智慧機器人的應用成為解決方案之一。黃登淵舉例,技術成熟後,機器人的載台也可以改成像纜車一樣的單軌系統,手臂還可以配備剪刀,在高山茶園中代替採茶工人,幫助採摘茶葉,將這項技術推向其他面臨缺工壓力的農作物。